• Home
• Research
• Projects
• Patents
• Press
• Demos
• Code
• Teaching
• Talks
• People
• Contact
• CV
• Music
Research
Refocusing your eye from near to far; estimating the distance between two objects in a scene; estimating the speed of a passing object… You perform these tasks more than 100,000 times per day. The effortlessness with which you do these things belies the enormous computational complexity required to do them them well. Our work concentrates on understanding how to estimate depth and motion from natural images. We determine how best to estimage image cues from natural images (e.g. defocus, disparity, motion) using mathematical and computational methods. We determine how these computations can be implemented by neurons. And we determine the computations that humans actually use with behavioral (psychophysical) experiments.
A fundamental goal of vision research is to understand how vision functions in the real world. How do we see? What are the computations that most accurately transform sensory information into behaviorally relevant representations of the environment? What are the computations that humans and animals actually use? Unfortunately, natural stimuli are complicated and difficult to characterize mathematically. As a result, most vision research uses simple, artificial stimuli that are easier to characterize (e.g. bars and blobs). Most of our knowledge about visual processing derives from research with artificial stimuli; however, these stimuli lack many of the properties inherent to natural stimuli, the stimuli the visual system evolved to process. And models developed with artificial stimuli tend to generalize poorly to more natural stimuli. The science requires a new approach.
We develop tools to enable rigorous the characterization of task-relevant properties of natural stimuli. These tools help generate principled, quantitative hypotheses about how visual information should be ideally processed. These hypotheses are then used to design experiments testing behavioral performance and neural processing. We have discovered striking correspondences between ideal and human visual systems. Furthermore, even when an optimal solution does not appear to describe human performance well, it can often be used to improve technology.
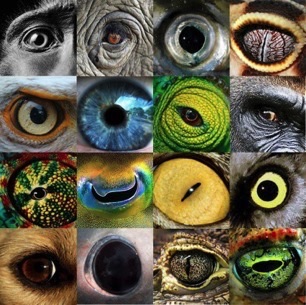
Name the animals! Answers are upside down: